ArduPilot is an open source autopilot system supporting many vehicle types: multi-copters, traditional helicopters, fixed wing aircraft, boats, submarines, rovers and more.
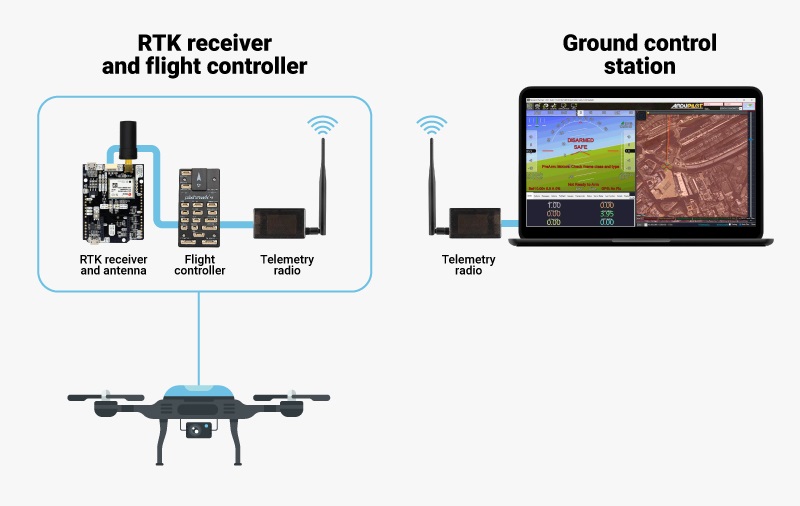
The Flight controller is the hardware component that runs the ArduPilot firmware, acting as the central “brain”. It processes input from various sensors (like GPS, accelerometers, and gyroscopes) to stabilize and control the vehicle. Popular flight controllers compatible with ArduPilot include the Pixhawk, Cube, and Navio2.
In most of out tutorial we tests with Pixhawk 4, you will need to adjust some parameters in other flight controllers.
 and
and 

 Made in EuropeRTK2B Boards
Made in EuropeRTK2B Boards