GNSS Heading + IMU Sensor Fusion in challenging environment
GNSS Heading + IMU Sensor Fusion in challenging environment
Customer project: measure accurate and robust heading
Accurate heading is required in several applications, from bathymetric sea surveys, drone flight controllers, etc.. today we will take about a specific customer that requires an accurate heading reading for heavy machinery visual guidance and data acquisition in extremely challenging environments. Our customer uses these heavy machinery at high altitude, surrounded by alpine terrain, forests and operates them sometimes at extreme attitudes.
People are generally aware of GPS technology since it is found in many daily gadgets. If you are reading this text right now, you are probably aware of RTK GNSS technology, capable of providing centimeter level accuracy. There is another interesting application that is not very popular but is really impressive, the usage of GNSS RTK technology with dual antennas to achieve extremely accurate heading, without any calibration required, and even without corrections. With two antennas and a clear sky, you can get easily <0.01 deg accuracy in heading.
Heading sensors: pros and cons
Ok, wait, before talking about state of the art GNSS based heading, let’s review the *main heading sensors to see their strong and weak points.
Magnetometer. May be the most popular heading sensor. It works like the old school compass.
Pro
Con
Low cost, low power
Sensitive to interferences, requires frequent calibration
Provides absolute heading
Low accuracy
IMU (without magnetometer). Popular sensor, available on every smartphone.
Pro
Con
Accurate short term readings
Provides relative heading
Fast and high accuracy in short term
Drift over time
Course over ground. Not a sensor by itself, but can be used as one. It differentiates GNSS position to estimate vehicle movement heading (not real heading).
Pro
Con
Provides absolute heading
Only calculates heading of motion and doesn’t work if vehicle is static or at low speeds
All GNSS sensors provide this measurement
Slow and sensitive to bad GNSS signal
GNSS Compass. May be the most popular heading sensor. It works like the old school compass.
Pro
Con
High accuracy, no drift
Slow and sensitive to bad GNSS signal
Provides absolute heading
Bulkier
*We skip FOG (Fiber Optic Gyroscope), RLD (Ring Laser Gyroscope), Visual Odometry and other fancy and expensive heading sensors on purpose
Which heading sensor shall we use?
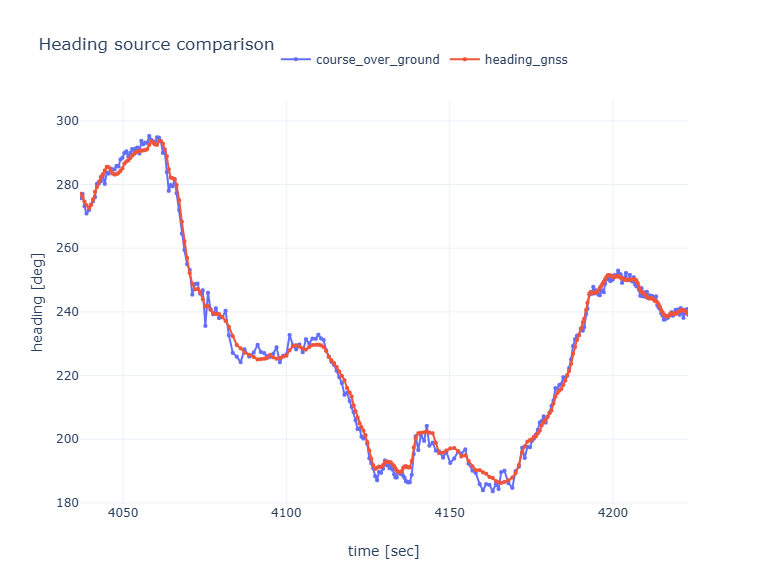
From the table above, it’s clear that all sensors have some advantages but none is perfect. Under very specific conditions, using one sensor may be enough. In the picture below, you can see such an example: the vehicle is moving forward, with an unobstructed view of the sky, in such conditions, both the course over ground and GNSS compass sensors match almost perfectly:
but real like conditions are often not so perfect, we have prepared a couple of examples to show typical behaviors.
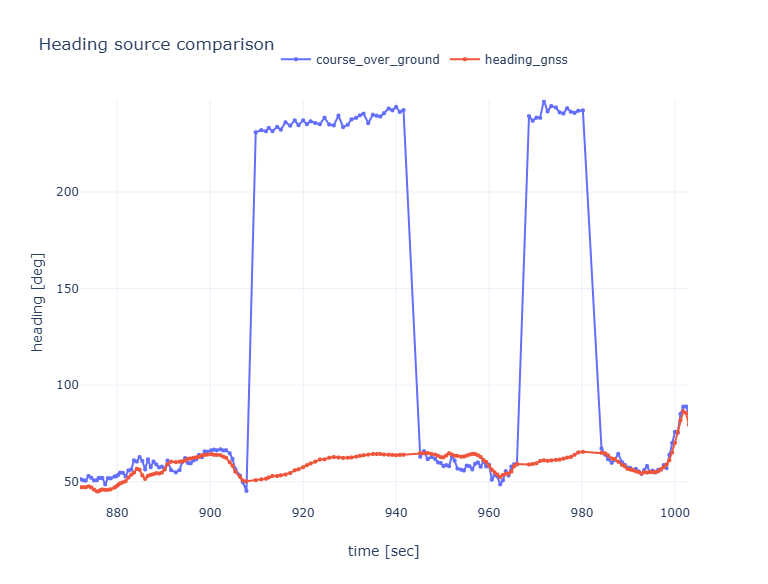
Example 1: machine going backwards, you can see how the heading of the vehicle remains very stable but course over ground shifts 180deg, as the GNSS receiver assumes the a vehicle only goes forward.
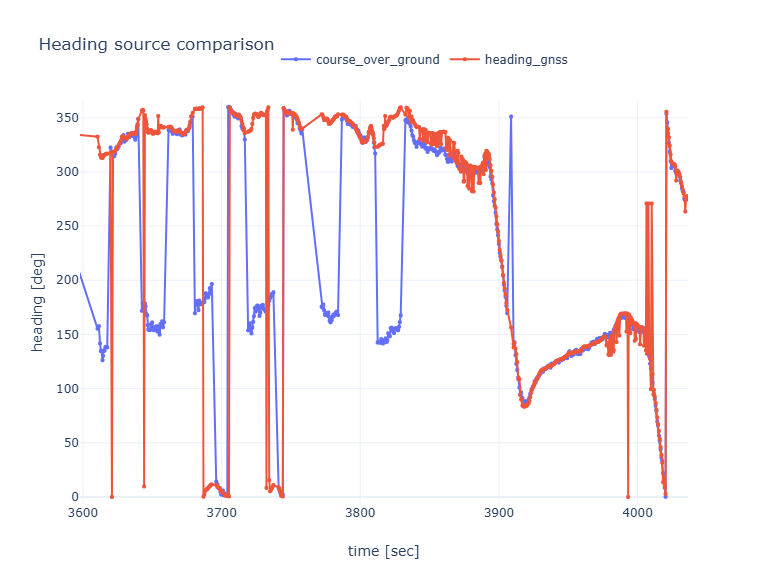
Example 2: loss of RTK corrections/bad GNSS signal reception due to extreme attitude/near-forest operation/deep valley operation. In this case, signals are not reliable, they show a noisy behavior and a clear mismatch between sensors.
A robust solution is clearly the only way to go. It would be great if you could take the best of each sensor and combine them together.
To improve the above measurements we need a bit of ̶m̶a̶g̶i̶c̶ mathematics in mixing all the sensors inside simpleRTK2B SBC (GNSS compass, IMU, magnetometer) combined with know how about sensor status flags, this is called: sensor fusion.
Results: reliable signal and happy customer!
In the interactive chart below, you can see the original sensors and the virtual sensor fusion signal, calculated in real time. This signal is immune to GNSS signal interferences, it is fast and robust.
Heading source comparison interactive chart
Hardware setup
In this case the setup is extremely simple, 1x simpleRTK2B SBC with two ZED-F9P and 2x Budget Survey GNSS Multiband antenna. You can find more information about these products below.
1. Our engineering team will contact you to solve any questions
2. We will keep you updated about promotions and new product releases
3.You will only hear from us when we have important news, we won’t spam your email
 and
and