Global Navigation Systems (GNSS) for civil use, like GPS, GLONASS, Galileo or BeiDou, can reach under excellent conditions an absolute accuracy of around 1-3 meters, in a few seconds.
This accuracy can be reduced to a few decimeters, only under static conditions and after a long survey time (24 hours).
But of course, we want to have good accuracy on moving applications 🙂
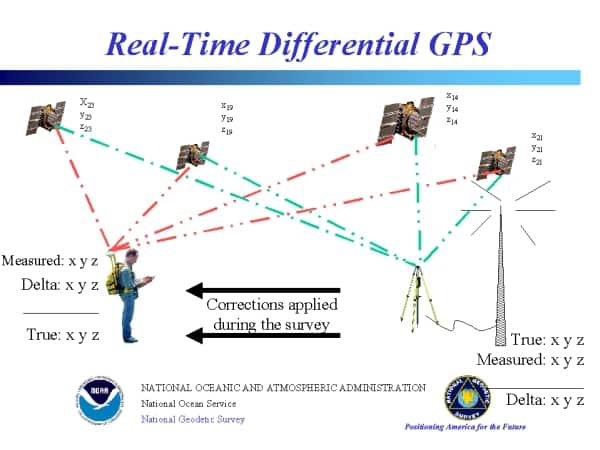
Real-Time Kinematic (RTK) positioning, is a technique used to solve this limitation.
By performing measurements of the same satellites signal, from 2 nearby units, we can extract the common errors, and achieve a very high relative accuracy, that can reach 5 centimeters.
If in addition, we know the absolute position of one unit (also called “Base”), we will also have the position of the “Rover” with high absolute accuracy.
u-blox made an excellent 2-min video that explains it in a more visual way:
1. Our engineering team will contact you to solve any questions
2. We will keep you updated about promotions and new product releases
3.You will only hear from us when we have important news, we won’t spam your email
 and
and