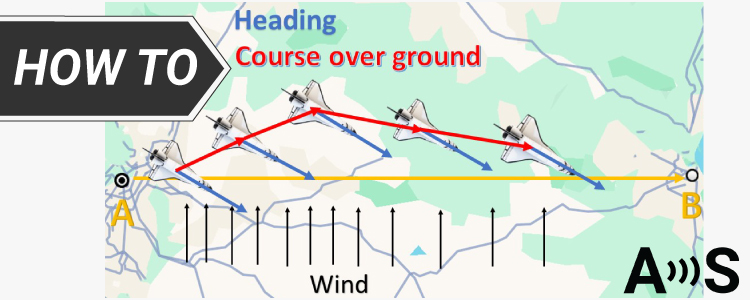
Course over ground (COG) refers to the actual direction over the ground that a moving object is currently following. It represents the real trajectory over the Earth’s surface, taking into account factors like wind, currents, or other forces affecting the object’s movement.
COG is the instantaneous direction of motion at a given point in time. Sometimes it can also be called the heading of motion.
If we supposed that the wind was stronger than expected then the red arrow will show the COG.
 and
and