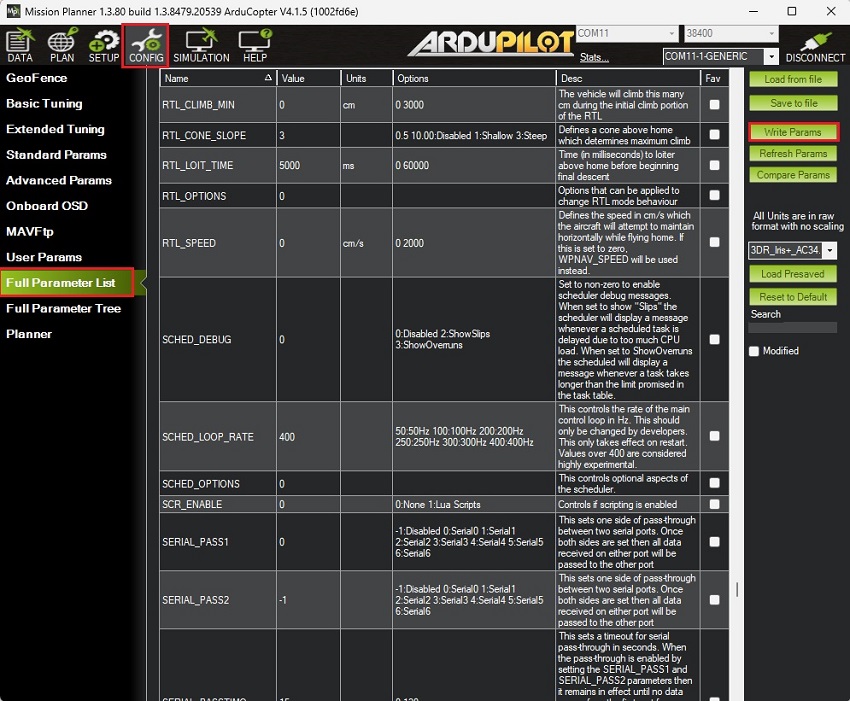
Go to CONFIG–>Full Parameter List.
Given that the firmware versions might differ from yours, there is a list of all parameters that have been modified compared to the default configuration below:COMPASS_ENABLE,0
COMPASS_USE,0
COMPASS_USE2,0
COMPASS_USE3,0
EK3_MAG_CAL,2
EK3_SRC1_YAW,2
GPS_AUTO_CONFIG,0
GPS_AUTO_SWITCH,0
GPS_POS1_X,-1.25 *This value must contain the distance in meters between antennas. Change sign if heading has a 180deg offset (or swap SMA connectors in simpleRTK2B+heading).
GPS_PRIMARY,1
GPS_RATE_MS, 100
GPS_RATE_MS2, 100
GPS_TYPE,0
GPS_TYPE2,2
SERIAL1_BAUD,460
SERIAL1_OPTIONS,0
SERIAL1_PROTOCOL,5
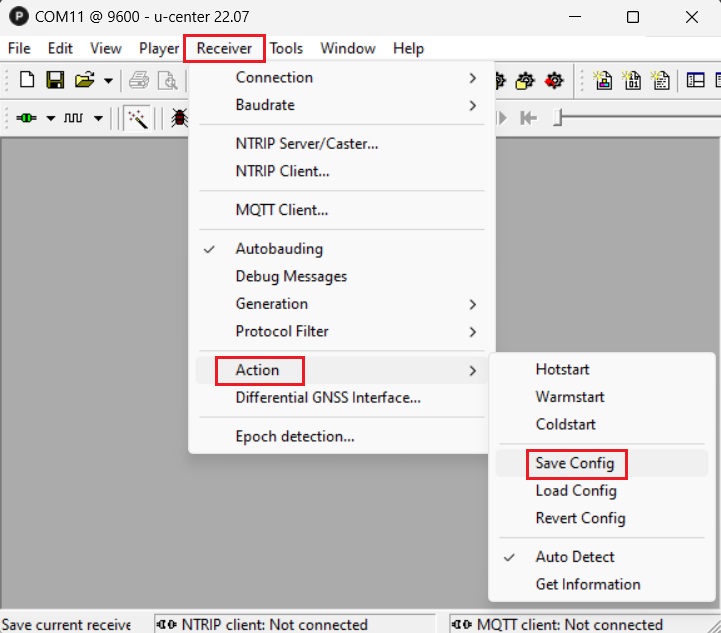
Press Write Params to save your setting.
 and
and