Base
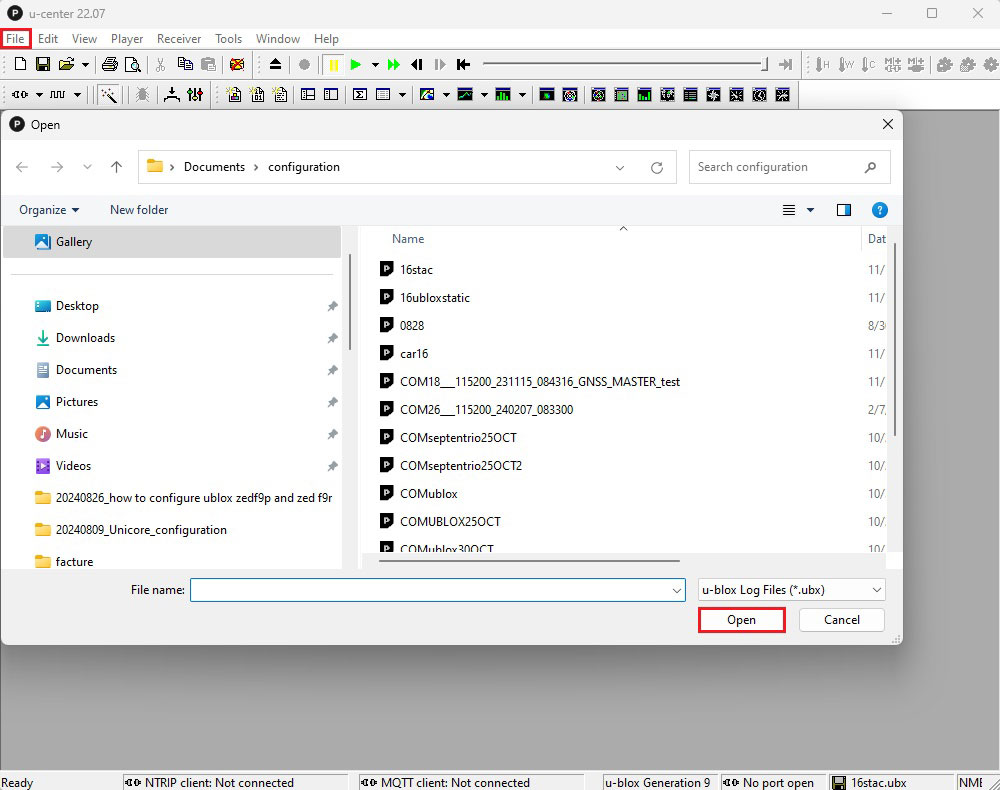
It will set your receiver as a base station using the survey-in mode of u-blox. | File | File | Starting from a default ZED-F9P configuration:
Enable survey-in with target accuracy 2.5m (should take no more than 5-10min)
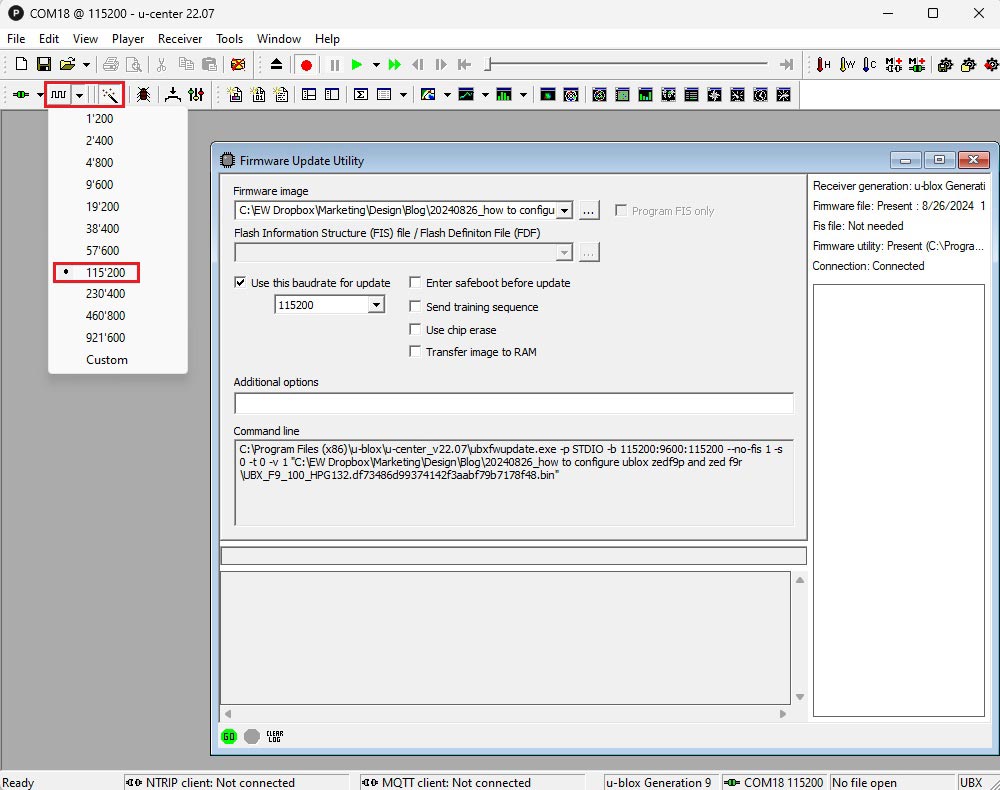
Change UART2 baudrate to 115kbps. This improves the buffer use of the radio links.
Activate following RTCM messages
1005: Stationary RTK reference station ARP
1074: GPS MSM4
1084: GLONASS MSM4
1094: Galileo MSM4
1230: GLONASS code-phase
We have selected this combination of messages because it's a good tradeoff between performance and required data link:
Performance can be improved by using MSM7 messages
RF Bandwidth can be improved by eliminated more constellations (e.g. remove Galileo), or increase 1005 to only be sent once every 5 seconds. |
| Rover 1Hz | File | File | Starting from a default ZED-F9P configuration:
Change UART2 baudrate to 115kbps. This improves the buffer use of the radio links.
Disable SBAS, to avoid position jumps during short RTK corrections interruptions.
Disable BeiDou, to make it simpler to increase navigation rate to 10Hz without troubles. |
| Rover 5Hz | File | File | Starting from a default ZED-F9P configuration:
Change UART2 baudrate to 115kbps. This improves the buffer use of the radio links.
Disable SBAS, to avoid position jumps during short RTK corrections interruptions.
Disable Beidou, to make it simpler to increase navigation rate to 10Hz without troubles.
Disable GSV on UART to avoid buffer overflw
Change navigation rate to 200ms |
| Rover 10Hz | File | File | Starting from a default ZED-F9P configuration:
Change UART2 baudrate to 115kbps. This improves the buffer use of the radio links.
Disable SBAS, to avoid position jumps during short RTK corrections interruptions.
Disable Beidou, to make it simpler to increase navigation rate to 10Hz without troubles.
Disable GSV on UART to avoid buffer overflw
Change navigation rate to 100ms |
Send NMEA messages to communication plugin
Enable NMEA on COM2 of the receiver, allowing you to connect the receiver to your mobile device via Bluetooth, BLE, or use radio and other communication plugins on Xbee socket. | File | File | Starting from a default ZED-F9P configuration:
Disable SBAS, to avoid position jumps during short RTK corrections interruptions
UART2 activate NMEA output via UBX-CFG-PRT and change baudrate to 115'200bps
Activate GST so accuracy estimates are also visible
Enabled High Precision NMEA with one extra decimal digit
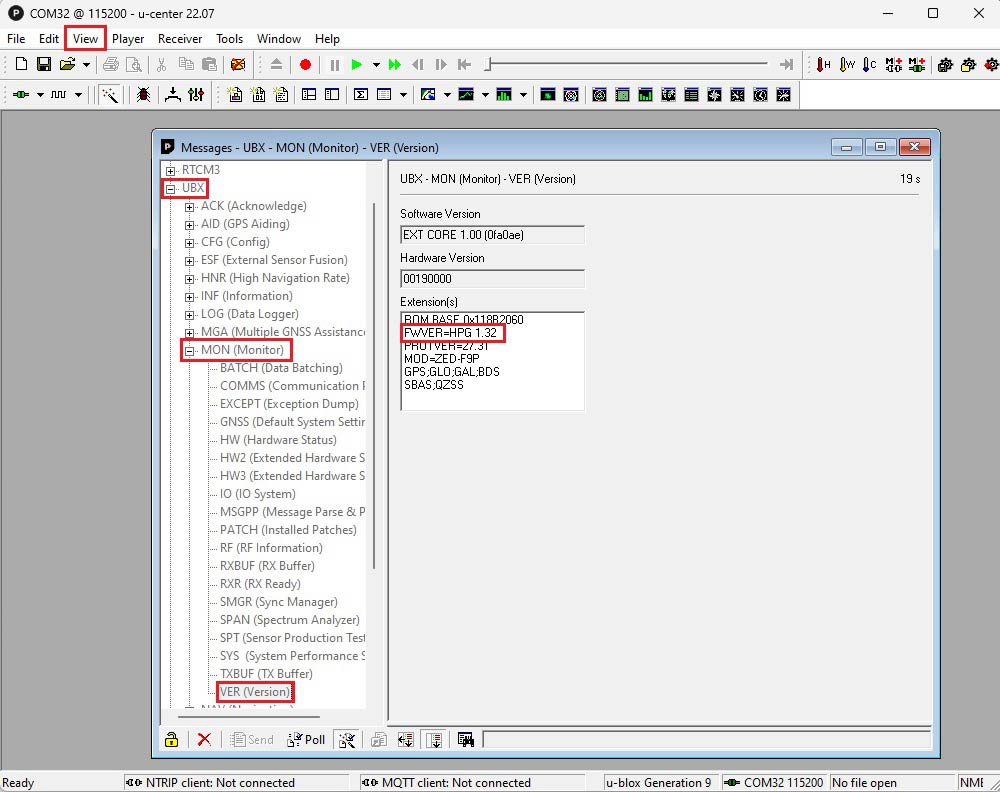
Enable SPARTN mode for PP compatibility (only on fw >=1.32) |
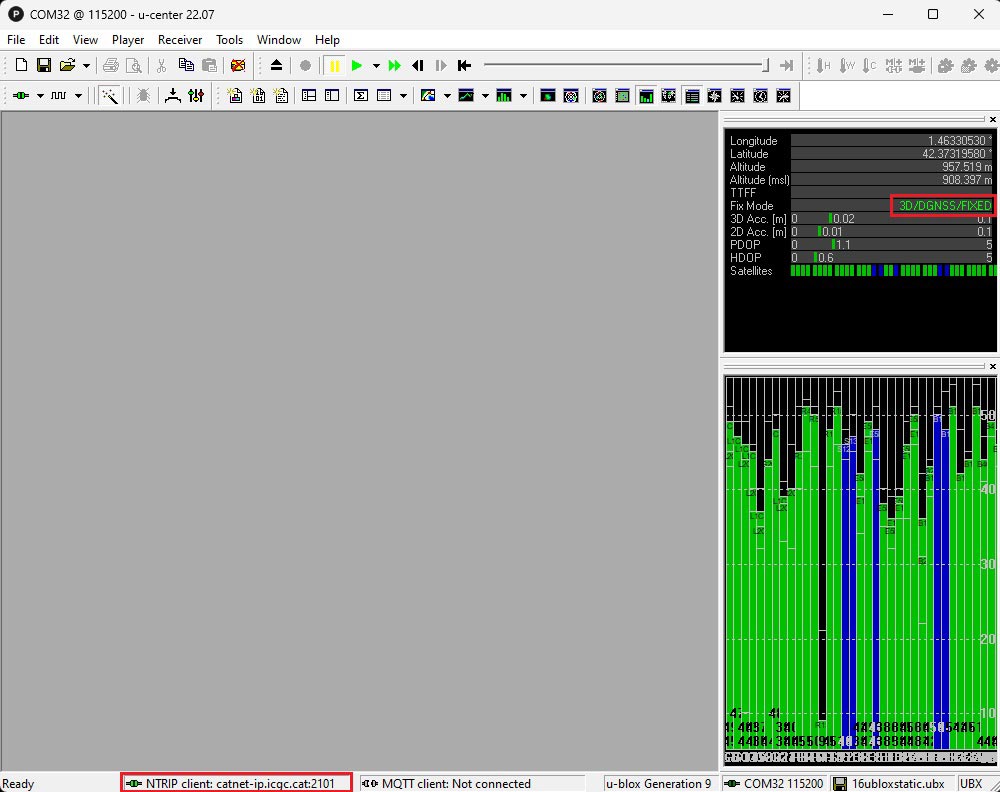
Rover 1Hz with 4G NTRIP Client (sending NMEA-GGA)
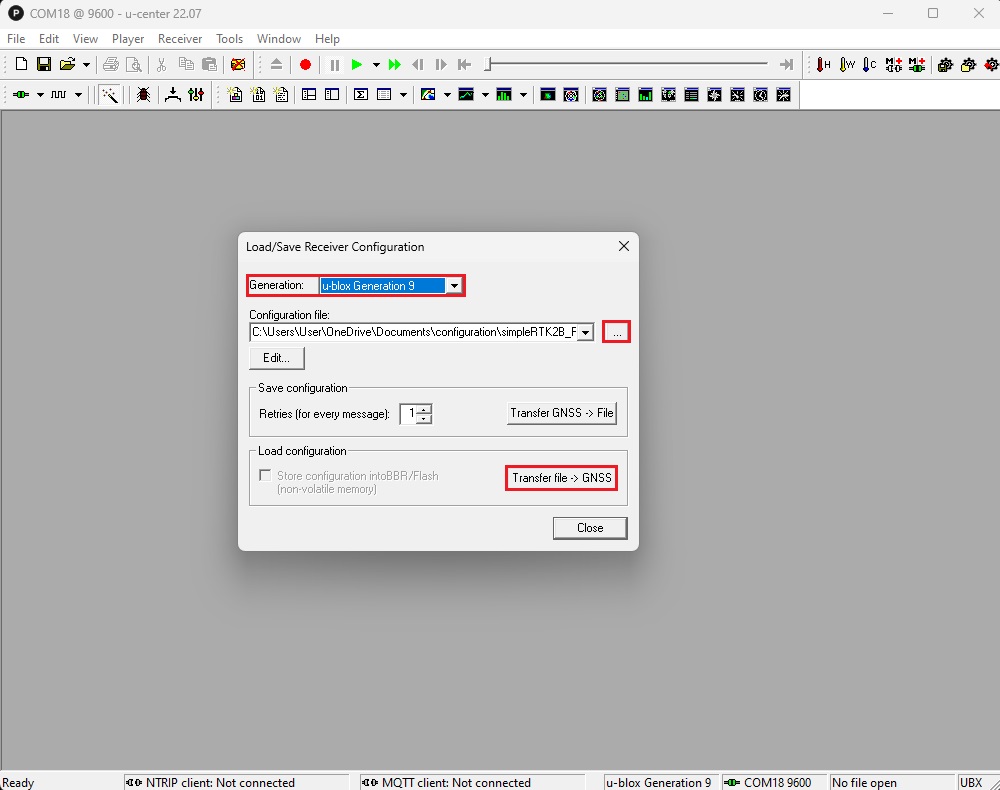
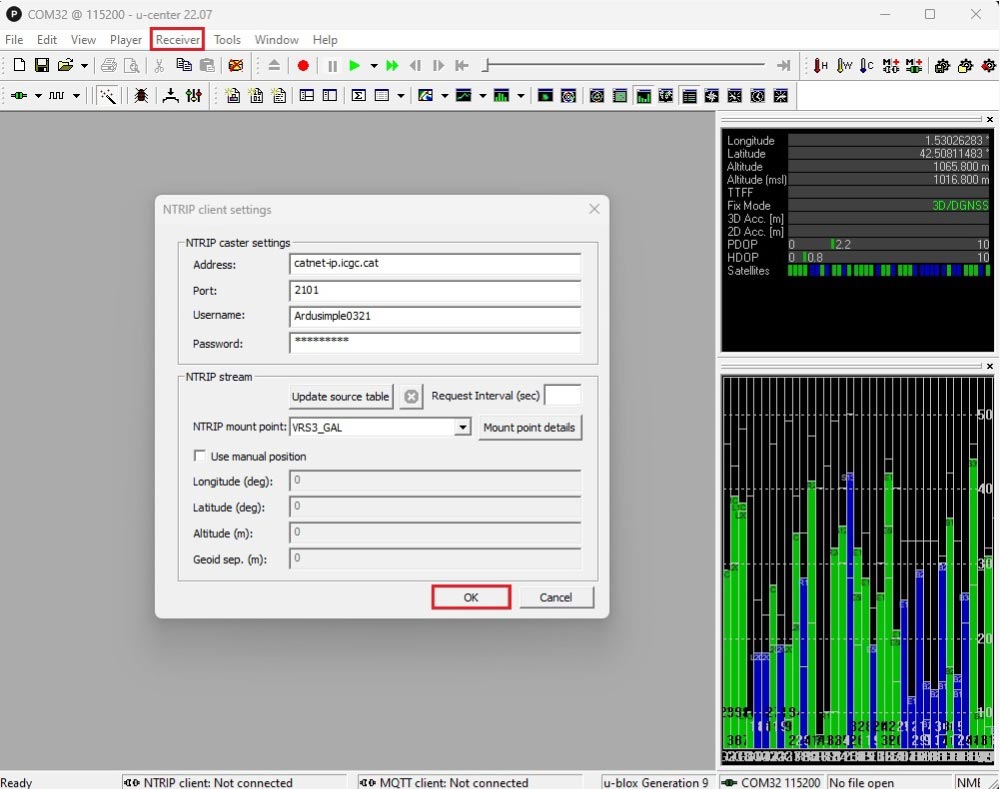
This configuration file allow connection to NTRIP client with VRS mountpoints. | File | File | Starting from a default ZED-F9P configuration:
Change UART2 baudrate to 115kbps. This improves the buffer use of the radio links.
Disable SBAS, to avoid position jumps during short RTK corrections interruptions.
Disable Beidou, to make it simpler to increase navigation rate to 10Hz without troubles.
Enable UART2 Protocol Out to NMEA
NMEA-GGA as output on UART2 to allow compatibility with VRS mountpoints
Disable the rest of NMEA messages on UART2
Only on FW >v1.30 RTCM+SPARTN+UBX are enabled as Protocol In on both UART1 and UART2 |
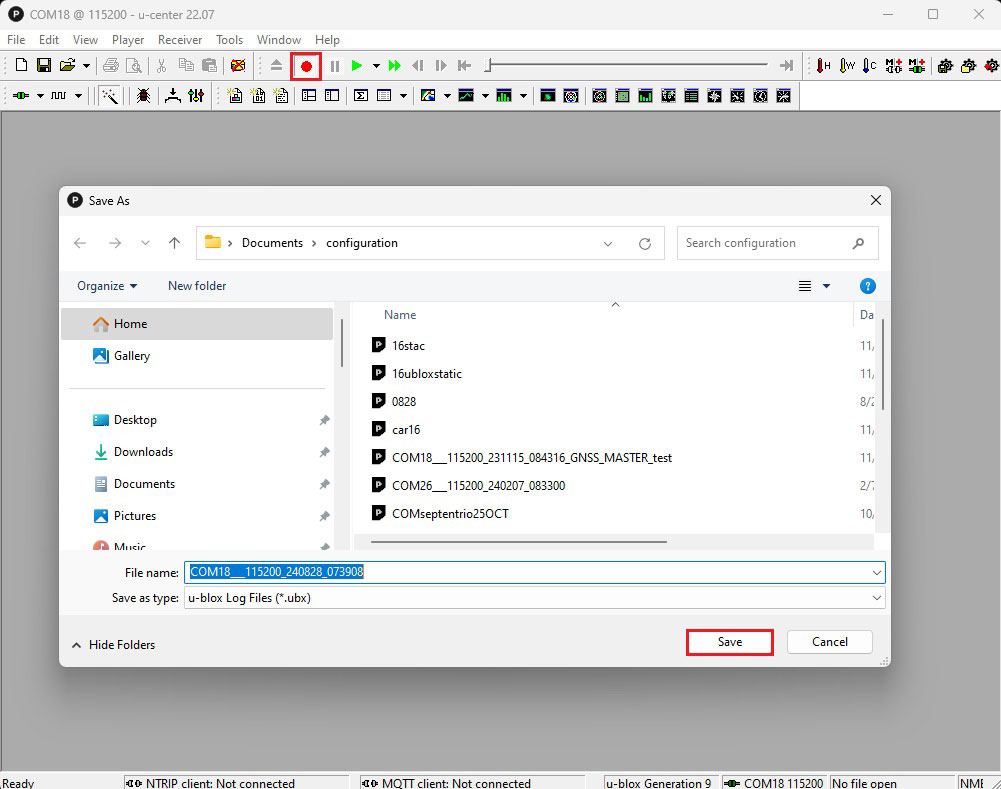
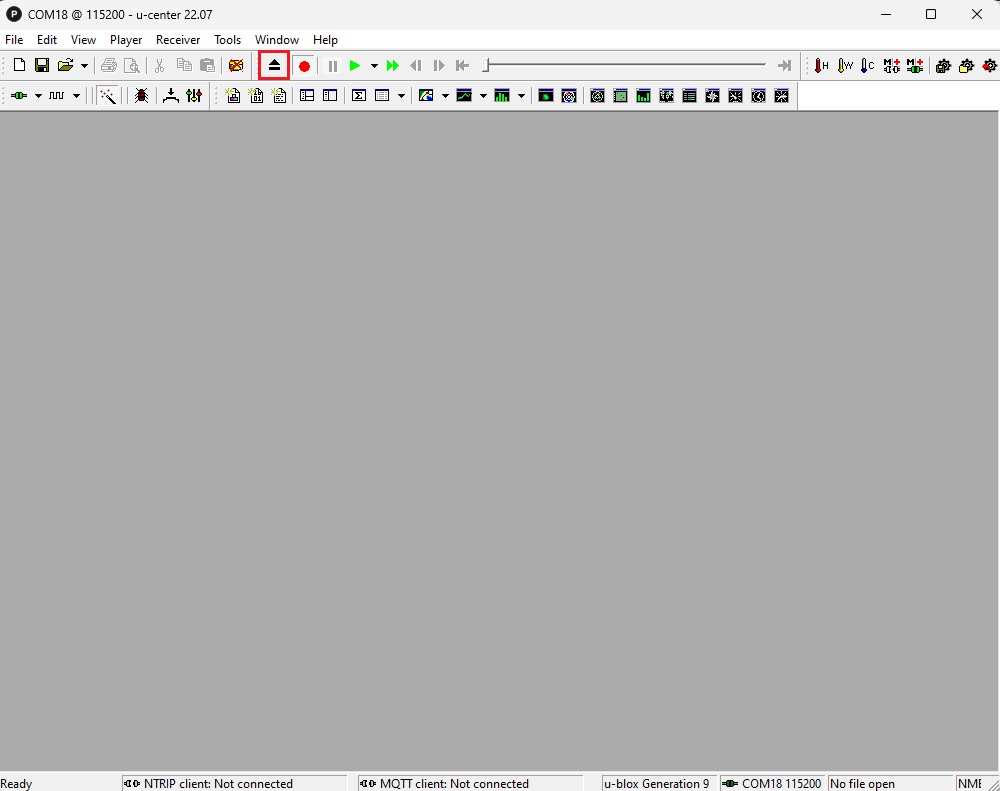
| RAW data (PPK) over UART1 & USB at 1Hz | File | File | NMEA messages disabled on UART1 and baudrate changed to 57'600 bps.
UART1 and USB output UBX-RXM-RAWX and UBX-RXM-SFRBX. (XBee switch must be on "XBEE TO GPS UART1").
On FW1.32 RAW data output is also enabled on UART2. |
 and
and 
 Plugins
Plugins Made in Europe
Made in Europe
 Made in EuropeRTK starter kits
Made in EuropeRTK starter kits Made in EuropeRTK starter kits
Made in EuropeRTK starter kits Made in EuropeRTK2B Boards
Made in EuropeRTK2B Boards Made in Europe
Made in Europe Made in EuropeRTK2B Boards
Made in EuropeRTK2B Boards Made in EuropeRTK2B Boards
Made in EuropeRTK2B Boards