 and
and 
-
Sale!
 Made in EuropeRTK starter kits
Made in EuropeRTK starter kitssimpleRTK2B – Basic Starter Kit
From 199,00€ Select options This product has multiple variants. The options may be chosen on the product page
-
Sale!
 Made in EuropeRTK starter kits
Made in EuropeRTK starter kitssimpleRTK2B – Starter Kit XLR
699,00€ Select options This product has multiple variants. The options may be chosen on the product page -
Sale!
 Made in EuropeRTK starter kits
Made in EuropeRTK starter kitssimpleRTK2B – Starter Kit MR
499,00€ Select options This product has multiple variants. The options may be chosen on the product page -
Sale!Made in EuropeRTK starter kits
simpleRTK2B – Starter Kit LR
From 592,00€ Select options This product has multiple variants. The options may be chosen on the product page
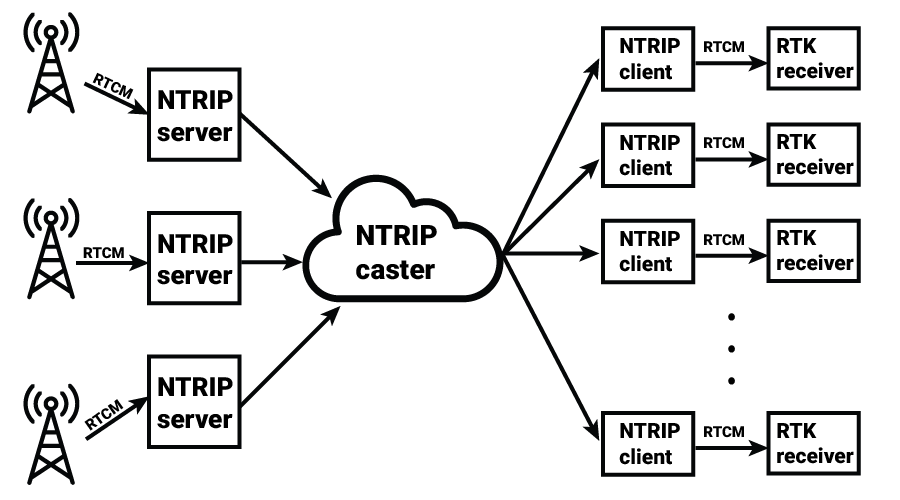
NTRIP is a language/protocol to distribute RTK corrections over internet/local network data IP packets. This allows to expand RTK networks with infinite bases and infinite rovers. A network with several NTRIP devices it’s called a NTRIP network. There are 3 possible elements in a NTRIP network:
Our simpleRTK2B boards don’t have IP interfaces (ethernet, wifi, etc) and don’t understand NTRIP protocol. They need someone outside to convert from NTRIP to RTCM and viceversa. For this reason we developed a series of accessories to enable NTRIP in our boards: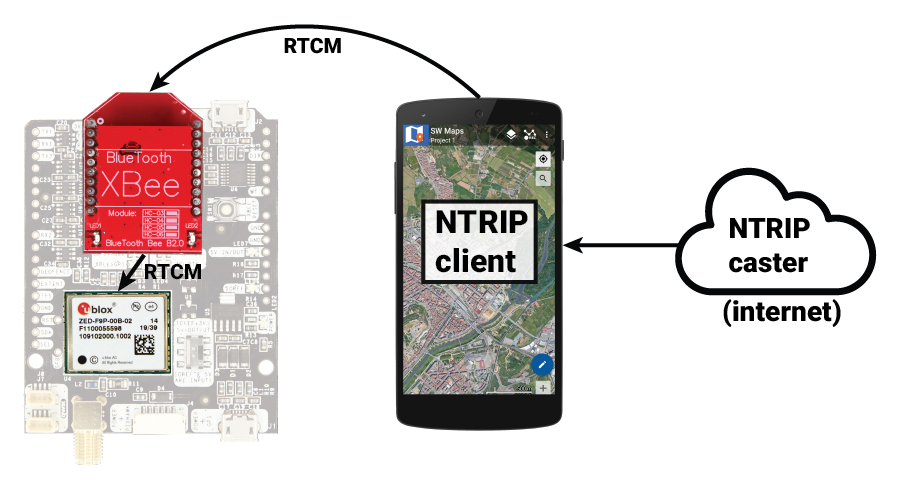
 Alternatively you can also connect your simpleRTK2B board to a PC or mobile phone via USB and use an application in your PC or mobile phone to do this conversion. Check out our tutorial to learn how to connect to a NTRIP caster.
Alternatively you can also connect your simpleRTK2B board to a PC or mobile phone via USB and use an application in your PC or mobile phone to do this conversion. Check out our tutorial to learn how to connect to a NTRIP caster.
- NTRIP caster. It’s a server that collects RTK corrections from one or several base stations, and distributes them among Rovers.
- NTRIP server. It’s a single physical RTK base station. It’s role is to send RTK corrections to a NTRIP Caster, so the Caster can distribute them to other clients. In networks with only one base station, it’s quite common to have an NTRIP server+caster together. In this case only the caster function is configured.
- NTRIP client. An RTK receiver that wants to receive RTK corrections. RTK Rovers are NTRIP clients.
Our simpleRTK2B boards don’t have IP interfaces (ethernet, wifi, etc) and don’t understand NTRIP protocol. They need someone outside to convert from NTRIP to RTCM and viceversa. For this reason we developed a series of accessories to enable NTRIP in our boards:
- Bluetooth: connect your simpleRTK2B board to your mobile phone via bluetooth. Your phone can now act as NTRIP client (but also as server or caster).
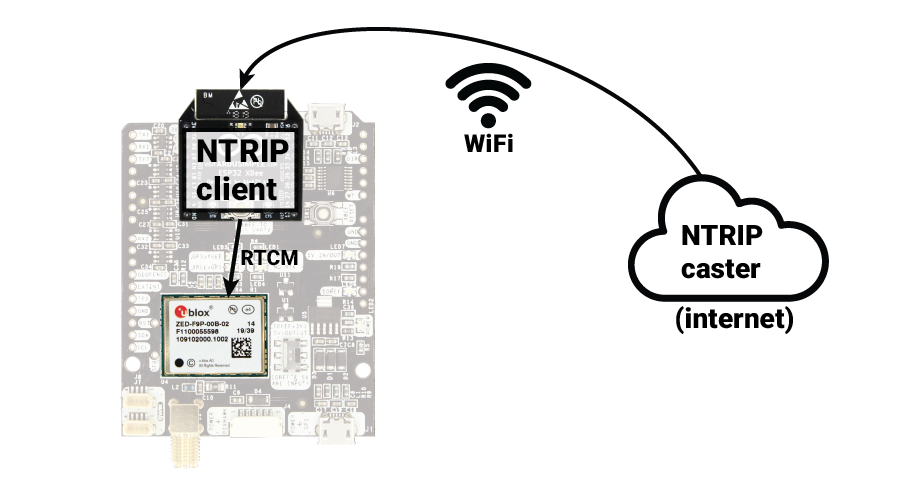
- WiFi: with a WiFi network available in your area, plug the WiFi NTRIP Master accessory and use your board as NTRIP client (but also as server or even server+caster).
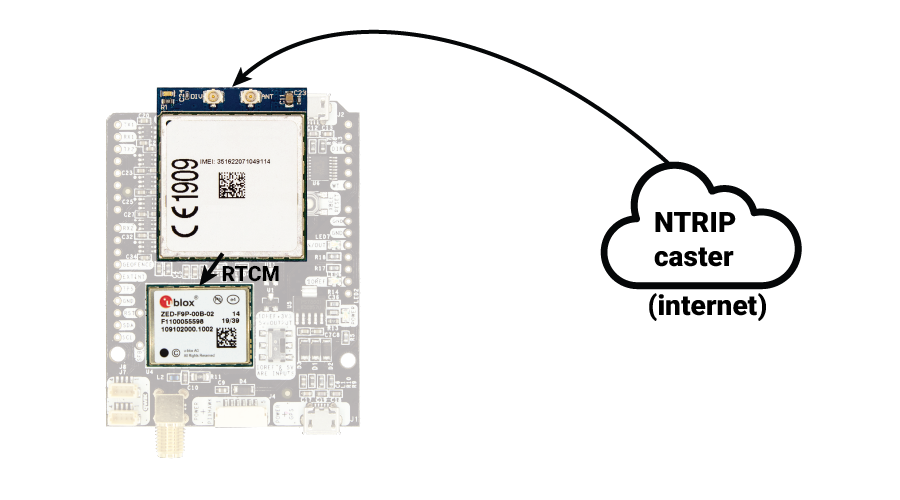
- 4G NTRIP Client: let your simpleRTK2B board become an NTRIP client anywhere where there is cell coverage.
Alternatively you can also connect your simpleRTK2B board to a PC or mobile phone via USB and use an application in your PC or mobile phone to do this conversion. Check out our tutorial to learn how to connect to a NTRIP caster.