 and
and 
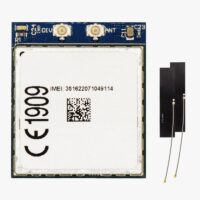
simpleRTK3B Heading does not include, but requires a good quality GPS/GNSS antenna.
simpleRTK3B Heading supports L1/L2/Eb5 bands. If you want to get the most out of this module, we recommend a Budget Survey GNSS Multiband antenna.
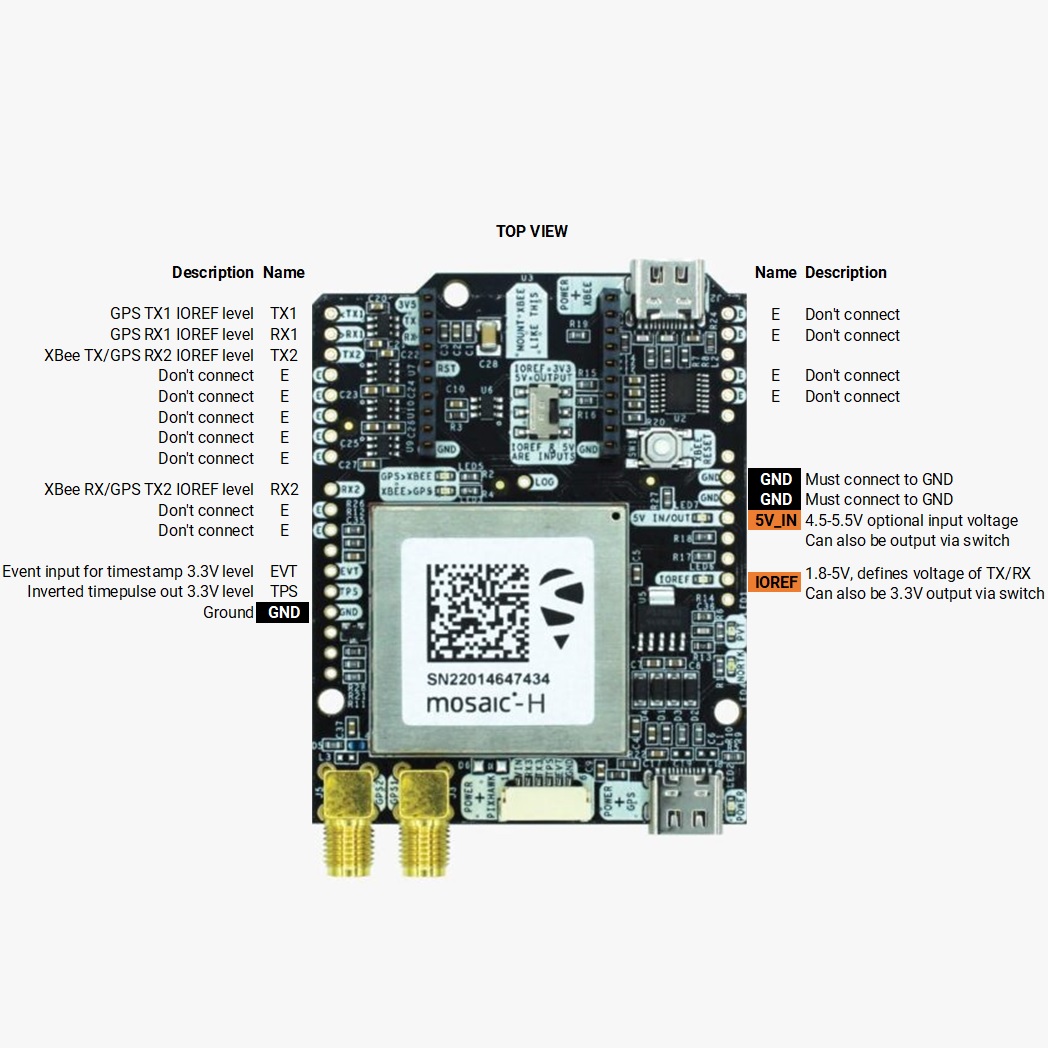
The board is compatible with both active antennas supporting 3.3V supply and passive antennas. The maximum output current is 150mA @ 3.3V.
If you use it with the traditional cheap GPS antennas widely available, you will not achieve the expected performance.
IMPORTANT: The installation of the antenna is also a key point to achieve the best results.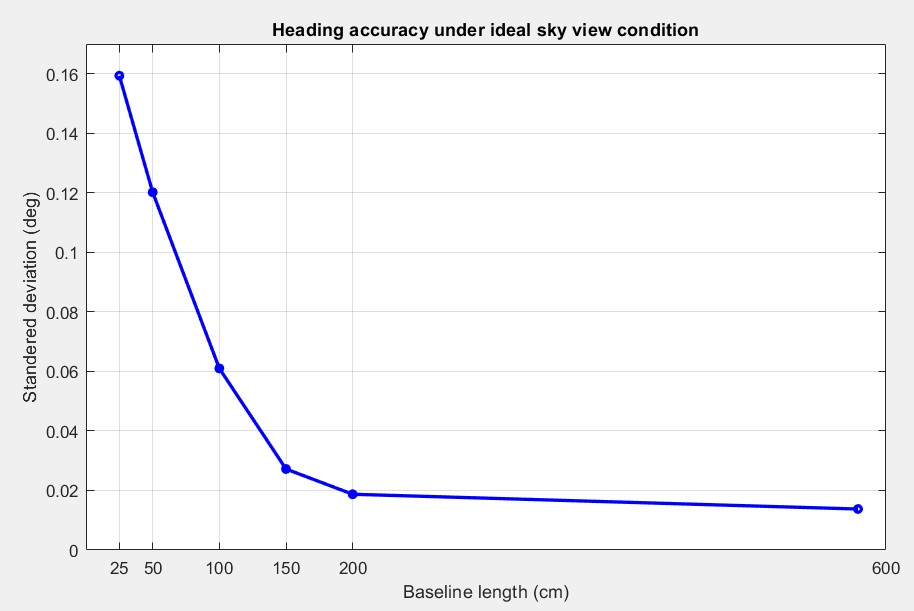
If you want to learn how installation impacts performance, please have a look at our GPS/GNSS antenna installation guide or look this video.
simpleRTK3B Heading supports L1/L2/Eb5 bands. If you want to get the most out of this module, we recommend a Budget Survey GNSS Multiband antenna.
The board is compatible with both active antennas supporting 3.3V supply and passive antennas. The maximum output current is 150mA @ 3.3V.
If you use it with the traditional cheap GPS antennas widely available, you will not achieve the expected performance.
IMPORTANT: The installation of the antenna is also a key point to achieve the best results.
- It is mandatory to connect the antenna before powering the board.
- The GPS/GNSS antenna should always be installed with the maximum possible view of the sky.
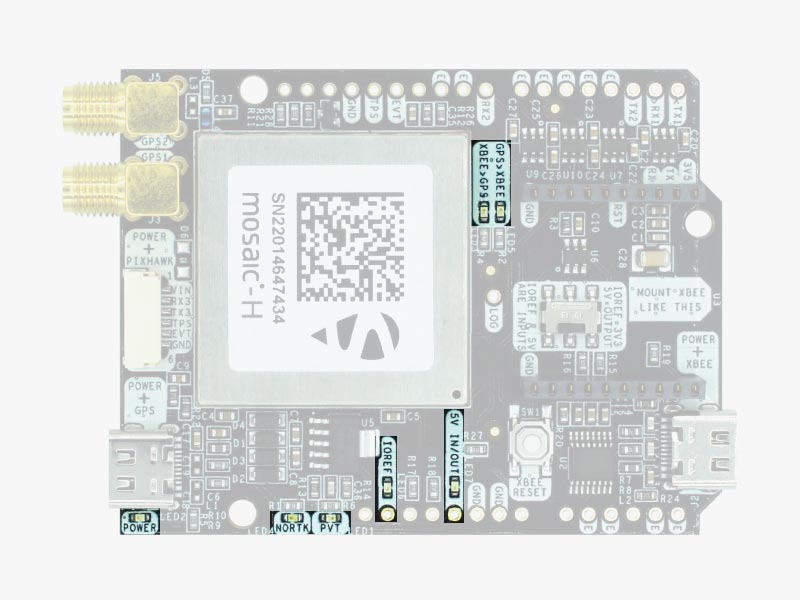
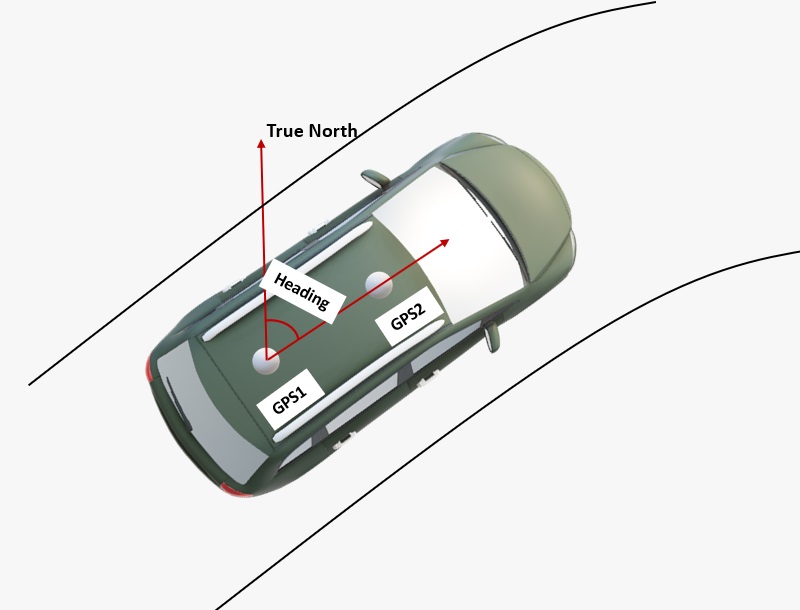
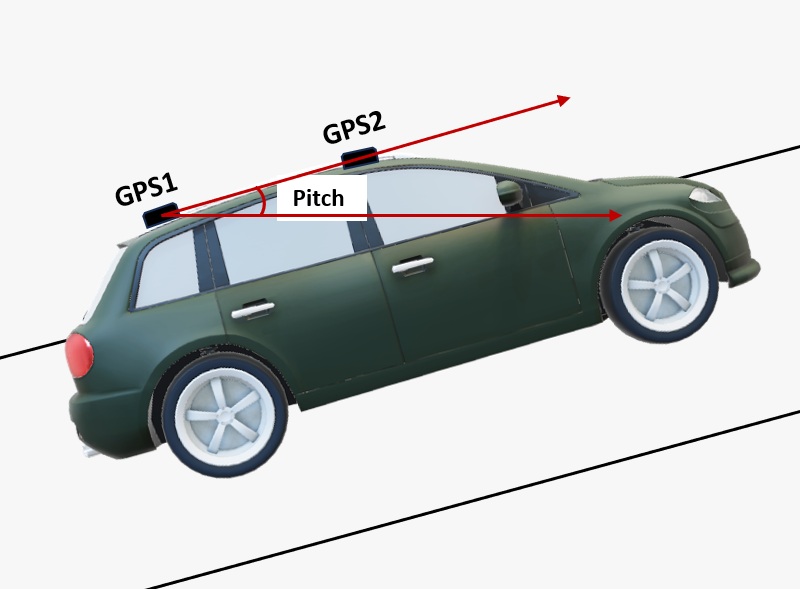
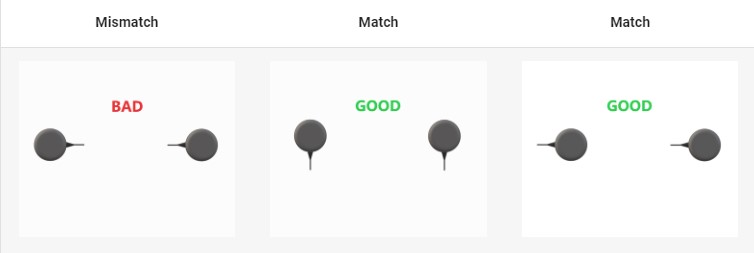
- In the default configuration, the antennas should be placed longitudinally along the vehicle, with the master antenna (GPS1) positioned at the front.
- In addition, if possible, it should be installed with a metallic plane behind, e.g. rooftop of the car, on a metal plate bigger than 20cm, etc.
- The heading accuracy will depend on antenna distance, check image below. With a good installation with 0.5 meters, you can get decent results.
If you want to learn how installation impacts performance, please have a look at our GPS/GNSS antenna installation guide or look this video.
-

-

-
 Plugins
PluginsRadio module Long Range (LR)
101,00€ This product has multiple variants. The options may be chosen on the product page -
 Plugins
PluginsRadio module eXtra Long Range (XLR)
161,00€ This product has multiple variants. The options may be chosen on the product page -

-

-
Sale!
 Made in Europe
Made in Europe -
Sale!
 Plugins
Plugins4G NTRIP Master
156,00€ This product has multiple variants. The options may be chosen on the product page -

-
Sale!

-

-
Sale!
 Made in EuropePlugins
Made in EuropePluginsPointPerfect L-Band Corrections Receiver NEO-D9S
Original price was: 125,00€.99,00€Current price is: 99,00€. -

-
RTK3B Boards
simpleRTK3B Heading
From 699,00€ This product has multiple variants. The options may be chosen on the product page
